6 Der Globus-Versuch
6.1 Lernsteuerung
6.1.1 Position im Modulverlauf
Abbildung 1.1 gibt einen Überblick zum aktuellen Standort im Modulverlauf.
6.1.2 Überblick
In diesem Kapitel übersetzen wir eine Problemstellung (Forschungsfrage) in ein (mathematisches) Modell, das uns dann mithilfe der Bayes-Formel Antworten auf die Problemstellung gibt.
6.1.3 Lernziele
Nach Absolvieren dieses Kapitels sollen folgende Lernziele erreicht sein.
Sie können …
- Unterschiede zwischen Modellen und der Realität erläutern
- die Binomialverteilung heranziehen, um geeignete (einfache) Modelle zu erstellen (für binomial verteilte Zufallsvariablen)
- die weite Einsetzbarkeit anhand mehrerer Beispiele exemplifizieren
- das Bayes-Modell anhand bekannter Formeln herleiten
- Post-Wahrscheinlichkeiten anhand der Bayesbox berechnen
6.1.4 Begleitliteratur
Der Stoff dieses Kapitels deckt einen Teil aus McElreath (2020), Kap. 2, ab. McElreath (2020) stellt das Globusmodell mit mehr Erläuterung und etwas mehr theoretischem Hintergrund vor, als es in diesem Kapitel der Fall ist.
6.1.5 Vorbereitung im Eigenstudium
6.1.6 Begleitvideos
6.1.7 Benötigte R-Pakete
6.2 Von Welten und Golems
6.2.1 Kleine Welt, große Welt
Bekanntlich segelte Kolumbus 1492 los, und entdeckte Amerika1. Das war aber ein glücklicher Zufall, denn auf seinem Globus existierte Amerika gar nicht. Vielleicht sah sein Globus so aus wie der von Behaim, s. Abb Abbildung 6.1.

Quelle: Ernst Ravenstein, Wikimedia, Public Domain
{kind=link}
Die kleine Welt des Modells entsprach hier nicht der großen Welt, der echten Erdkugel.
Das ist ein Beispiel, das zeigt, wie Modellieren schiefgehen kann. Es ist aber auch ein Beispiel für, sagen wir, die Komplexität wissenschaftlicher (und sonstiger) Erkenntnis. Einfach gesagt: Glück gehört halt auch dazu.
Behaims Globus ist nicht gleich der Erde. Die kleine Welt von Behaims Globus ist nicht die große Welt, ist nicht die Erde.
Was in der kleinen Welt funktioniert, muss nicht in der großen Welt funktionieren. Modelle zeigen immer nur die kleine Welt: Vorsicht vor schnellen Schlüssen und vermeintlicher Gewissheit.
🏋 Nennen Sie ein Beispiel, in dem ein Modell nicht (exakt) der Wirklichkeit entspricht! \(\square\)
6.2.2 Der Golem von Prag

Bildquelle: Mikoláš Aleš, Wikimedia, Gemeinfrei
Der Golem von Prag, die Legende einer vom Menschen geschaffene Kreatur mit gewaltiger Kraft, die Befehle wörtlich ausführt, s. Abbildung 6.2. Die Geschichte besagt, dass ein Rabbi mit Zauberkräften den Golem aus Lehm erschuf, um die jüdische Bevölkerung der Stadt zu schätzen. Bei kluger Führung kann ein Golem Nützliches vollbringen. Bei unüberlegter Verwendung wird er jedoch großen Schaden anrichten.
6.2.3 Wissenschaftliche Modelle sind wie Golems
Golem
Eigenschaften des Golems:
- Besteht aus Lehm
- Belebt durch “Wahrheit”
- Mächtig
- dumm
- Führt Befehle wörtlich aus
- Missbrauch leicht möglich
- Märchen
Modell
Eigenschaften eines Modells:
- Besteht aus
LehmSilikon - Belebt durch Wahrheit (?)
- Manchmal mächtig
- simpler als die Realität
- Führt Befehle wörtlich aus
- Missbrauch leicht möglich
- Nicht einmal falsch
Wir bauen Golems.
Abbildung 2.5 stellt ein Sinnbild von Modellen dar.
Vergleichen wir die kleine Welt unserer Modellen (Tabelle 6.1), wie z.B. Behaims Globus, mit der Großen Welt, die Kolumbus und wir befahren.
| Kleine Welt | Große Welt |
|---|---|
| Die Welt, wie sie der Golem sieht | Die Welt, wie sie in Wirklichkeit ist |
| ist das Modell, aber nicht (zwangsläufig) die Wirklichkeit | entspricht nicht (zwangsläufig) dem Modell |
| Verwenden wir beim Modellieren | Ist das, was wir modellieren |
Beispiel 6.1 (Die Bayes-Formel und Lernen) 🏋 Bayes-Inferenz ähnelt dem Lernen von Menschen. Geben Sie ein Beispiel von Lernen bei Menschen, das oben dargestelltem Prozess ähnelt! \(\square\)
Beispiel 6.2 (Ein Regressionsmodell stammt aus der kleinen Welt) Ein wissenschaftliches Modell, etwa auf Basis eines Regressionsmodells ist Teil der kleinen Welt. Man muss sich bei der Interpretation eines Regressionsmodells vor Augen halten: “Die Ergebnisse des Modells sind nur richtig unter der Annahme, dass sich der Zusammenhang X und Y durch eine Gerade beschreiben lassen und unter der Annahme, dass meine Daten repräsentativ sind.” \(\square\)
6.3 Ein erster Versuch: Wir werfen den Globus
6.3.1 Das Bayes-Update
Beispiel 6.3 (Wasseranteil auf der Erdoberfläche) Unsere Forschungsfrage lautet, mit welchem Anteil die Erde wohl mit Wasser bedeckt ist (Abbildung 6.3)? Um möglichst wenig schreiben zu müssen, schreiben wir für “angenommener Wasseranteil auf der Erdoberfläche” kurz \(p\) oder \(\pi\) (p wie proportion, Anteil). \(\square\)

Analog können wir uns vorstellen, 11 Wissenschaftler haben jeweils eine andere Hypothese zum Wasseranteil, \(\pi\), der Erde. Die erste Person hat die Hypothese \(\pi_1 = 0\), die zweite Person geht von \(\pi_2 = 0.1\) aus … die 11. Person von \(\pi_{11} = 1\).
Um die Forschungsfrage zu beantworten, werfen Sie einen Globus-Ball in die Luft und fangen in wieder auf. Sie notieren dann, ob die Stelle unter Ihrem Zeigefinger Wasser zeigt (W) oder Land (L). Den Versuch wiederholen Sie, bis Sie den Globusball insgesamt 9 Mal geworfen haben.2
So sah mein3 Ergebnis aus:
\[W \quad L \quad W \quad W \quad W \quad L \quad W \quad L \quad W\]
Also \(W=6\) (Wasser, d.h. “Treffer”) und \(L=3\) (Land, “Niete”) (\(n=9\) Versuche).
Übungsaufgabe 6.1 (Der Globusversuch) 🏋️️ Besorgen Sie sich einen Globus (zur Not eine Münze) und stellen Sie den Versuch nach! \(\square\)
Beispiel 6.4 (Wir schießen Sonden ins Weltall) Eine alternative Geschichte für den Globusversuch: Es ist das Jahr 2345536. Sie arbeiten für eine eine Weltraumbehörde. Gestern haben Sie einen Planeten entdeckt, weit draußen im All. Jetzt geht es um die Frage, wie viel Wasser es auf der Oberfläche dieses Planeten gibt. Dazu schießen Sie (bzw. Ihre Behörde) eine Reihe von Sonden auf den Planeten. Wir gehen davon aus, dass die Landeplätze dieser Sonden voneinander unabhängig sind. Sagen wir, es werden \(n=9\) Sonden hochgeschossen, und davon landen \(W=6\) im Wasser. \(\square\)
6.3.2 Bayes-Updates
Der Bayes-Golem denkt eigentlich ganz vernünftig: Zuerst (“Apriori”) hat er ein Vorwissen zum Wasseranteil, die dazugehörige Wahrscheinlichkeitsverteilung nennt man Apriori-Verteilung (s. Definition 6.1). In unserem Beispiel ist das Vorwissen recht bescheiden: Jeder Wasseranteil ist ihm gleich plausibel. Als nächstes beschaut sich der Golem die Daten und überlegt, wie wahrscheinlich die Daten sind, wenn man von einer bestimmten Hypothese ausgeht, z.B. dass der Wasseranteil 50% beträgt. Die zugehörige Wahrscheinlichkeit der Daten unter Annahme einer Hypothese nennt man die4 Likelihood5, s. Definition 6.2. Als Letztes bildet sich der Golem eine abschließende Meinung zur Wahrscheinlichkeit jeder Hypothese. Diese Wahrscheinlichkeitsverteilung nennt man Aposteriori-Verteilung, s. Definition 6.3. Sie berechnet sich als Gewichtung des Vorwissens mit den neuen Daten, die durch die Likelihood repräsentiert werden. Anders gesagt: Das Vorwissen wird anhand der Erkenntnisse (der Daten) aktualisiert: das Bayes-Update, s. Abbildung 6.4.
graph LR A[Apriori-Vert.]-->B[Likelihood]-->C[Post-Vert.]-->A
Definition 6.1 (Apriori-Verteilung) Für jede Hypothese haben wir ein Vorab-Wissen, das die jeweilige Plausibilität der Hypothese angibt: Apriori-Verteilung (synonym: Apriori-Verteilung).\(\square\)
Definition 6.2 (Likelihood) Für jede Hypothese (d.h. jeden Parameterwert \(\pi\)) möchten wir wissen, wie wahrscheinlich die Daten sind (unter der Annahme, dass die Hypothese richtig ist). Anders gesagt: Die Likelihood sagt uns, wie gut die Daten zu einer bestimmten Hypothese passen.\(\square\)
Definition 6.3 (Aposteriori-Verteilung) Dann gewichten wir den Likelihood mit dem Vorabwissen, so dass wir die Aposteriori-Verteilung6 bekommen. \(\square\)
Übungsaufgabe 6.2 (Wie gut passen die Daten zur Hypothese, dass die Erde komplett trocken ist?) Wir haben in unseren Versuch \(W=6\) und \(L=3\) erzielt. Diese Daten passen überhaupt nicht zur Hypothese, dass die Erdoberfläche komplett trocken ist. Die Likelihood, \(L\) für \(\pi=0\) ist also Null. Analog ist die Likelihood für \(\pi=1\) auch Null. \(\square\)
6.3.3 Berechnung der Likelihood im Globusversuch
Wie wahrscheinlich ist es, ein bestimmtes Ergebnis, z.B. \(W=6\) Treffer (bei 9 Würfen), zu erhalten, wenn man eine bestimmte Hypothese (einen bestimmten Wasseranteil, z.B. 90%) annimmt? Diese Wahrscheinlichkeit nennt man die Likelihood, \(L = Pr(W = 6, n = 9| \pi=.9)\).
Wenn wir eine Binomialverteilung für die Globuswürfe annehmen, dann gehen wir davon aus, dass die Daten unabhängig voneinander entstehen und sich der Parameterwert nicht zwischenzeitlich ändert. 7 Der Wasseranteil der Erde bleibt während des Versuchs gleich (durchaus plausibel).
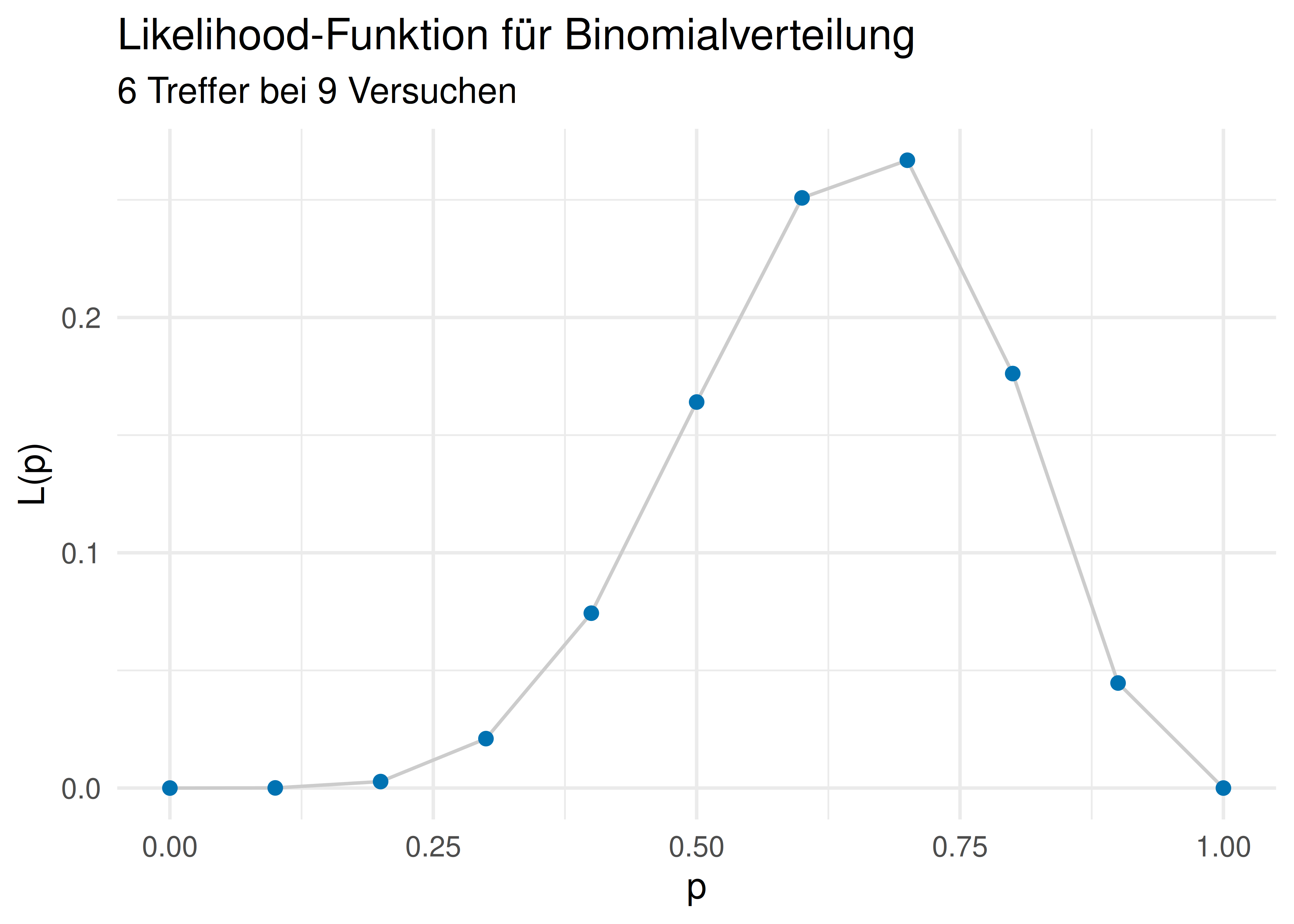
Berechnen wir also die Likelihood für verschiedene Hypothesen (Wasseranteile, \(\pi\)), für \(\pi = 0, 0.1, 0.2, \ldots, 1\), s. Listing 6.1. Wir halten also die Daten fest (6 Treffer bei 9 Würfen) und berechnen die Wahrscheinlichkeit dieser Daten für verschiedene Hypothesen (Wasseranteile, \(\pi\)).
dbinom(x = 6, size = 9, prob = .1)
dbinom(x = 6, size = 9, prob = .2)
dbinom(x = 6, size = 9, prob = .3)
dbinom(x = 6, size = 9, prob = .4)
dbinom(x = 6, size = 9, prob = .5)
dbinom(x = 6, size = 9, prob = .6)
dbinom(x = 6, size = 9, prob = .7)
dbinom(x = 6, size = 9, prob = .8)
dbinom(x = 6, size = 9, prob = .9)
## [1] 6.1e-05
## [1] 0.0028
## [1] 0.021
## [1] 0.074
## [1] 0.16
## [1] 0.25
## [1] 0.27
## [1] 0.18
## [1] 0.045Abbildung 6.5 visualisiert die Likelihood-Funktion für unser Beispiel (6 Wasser bei 9 Würfen) für verschiedene Hypothesen (Wasseranteile, \(\pi\)). Man sieht, dass die Likelihood um \(\pi = 0.7\) herum am höchsten ist.
Oder von Hand gerechnet für \(\pi = 1/2\), s. Gleichung 6.1:
\[\begin{aligned} Pr(\pi = 1/2| x = 6, n = 9) &=\\ \tbinom{9}{6} \cdot (1/2)^6 \cdot (1/2)^3 &=\\ \frac{9!}{6!3!} \cdot (1/2)^9 &= \\ 84 \cdot 1/512 = 21/128 &= 0.16 \end{aligned} \tag{6.1}\]
Mithilfe von R als Taschenrechner gerechnet:
anz_pfade <- choose(9, 6)
wskt_pro_pfad <- (1/2)^6 * (1/2)^3
gesamt_wskt <- anz_pfade * wskt_pro_pfad
gesamt_wskt
## [1] 0.16Für so viele Würfe (\(n=9\)) würde ein Baumdiagramm unübersichtlich werden, s. Abbildung 6.6. Visualisierungen wie Baumdiagramme sind eine praktische Hilfe zum Verständnis, kommen aber bei größeren Daten schnell an ihre Grenze.

Jetzt folgen einige Beispiele.
Beispiel 6.5 (Likelihood für \(W = 6, n = 9, \pi=.7\)) Was ist die Likelihood von \(W=6\) bei \(n=9\) gegeben \(\pi=.7\) bei unserem Globusversuch?
dbinom(x = 6, size = 9, prob = .7)
## [1] 0.27Oder, synonym, wenn man einen Taschenrechner (oder R als Taschenrechner) benutzt:
choose(9, 6) * (.7)^6 * (.3)^3
## [1] 0.27Noch “händischer” gerechnet:
Die Daten passen gut zur Hypothese \(\pi=.7\). \(\square\)
Zur Erinnerung: Die Funktion dbinom gibt uns die Wahrscheinlichkeit von x Treffern, bei size Versuchen zurück, wobei eine Binomialverteilung angenommen wird mit der Trefferwahrscheinlichkeit prob.
Beispiel 6.6 (Likelihood für \(W = 6, n = 9, \pi=1/3\)) Was ist die Likelihood von \(W=6\) bei \(n=9\) gegeben \(\pi=1/3\) bei unserem Globusversuch?
dbinom(x = 6, size = 9, prob = 1/3)
## [1] 0.034Offenbar ist \(\pi=1/3\) eine schlechte Hypothese, um die Daten zu erklären: Die Daten passen nicht gut zu ihr. \(\square\)
Beispiel 6.7 (Likelihood für \(\pi=0\)) Was ist die Likelihood von \(W=6\) bei \(n=9\) gegeben \(\pi=0\) bei unserem Globusversuch?
dbinom(x = 6, size = 9, prob = 0)
## [1] 0\(\pi=0\) ist offenbar eine sehr schlechte Hypothese, um die Daten zu erklären: Die Daten sind unmöglich unter dieser Hypothese. \(\square\)
(Fast) von Hand gerechnet:
Als Formel, s. Gleichung 6.2:
\[\begin{aligned} Pr(W=6 | \pi=.7, n=9) &=\\ \tbinom{9}{6} \cdot (.7)^6 \cdot (.3)^3 &=\\ \frac{9!}{6!3!} \cdot (.7)^6 \cdot (.3)^3 &=\\ 84 \cdot .003 = .27. \end{aligned} \tag{6.2}\]
\(\square\)
Es gibt Taschenrechner(-Apps), die die Binomialverteilung oder den Binomialkoeffizienten berechnen können.8
Übungsaufgabe 6.3 (Peer Instruction: Welcher Parameterwert ist am plausibelsten?) Wir führen wieder den Globusversuch durch (oder werfen eine Münze) und erhalten folgendes Ergebnis: 7 Mal Wasser und 2 Mal Land (also \(W=7\) und \(L=2\)).
Welcher Wasseranteil, \(\pi\) ist am plausibelsten?
- 0 Wasser (0%)
- 1/9 Wasser (ca. 11%)
- 3/9 Wasser (ca. 33%)
- 7/9 Wasser (ca. 78%)
- 9 Wasser (100%) \(\square\)
6.3.4 Unser Modell ist geboren
Ein Modell (in der Bayes-Statistik) besteht aus mind. drei Komponenten:
- Die Likelihood (die Wahrscheinlichkeit der Daten unter Annahme der Hypothese), s. ?eq-globus1
- Die Apriori-Verteilung(en) (die Wahrscheinlichkeit der Hypothese vor den Daten), a. Gleichung 6.3
- Die Aposteriori-Verteilung (die Wahrscheinlichkeit der Hypothese nach den Daten), s. Abbildung 7.1
6.3.5 Apriori-Verteilung
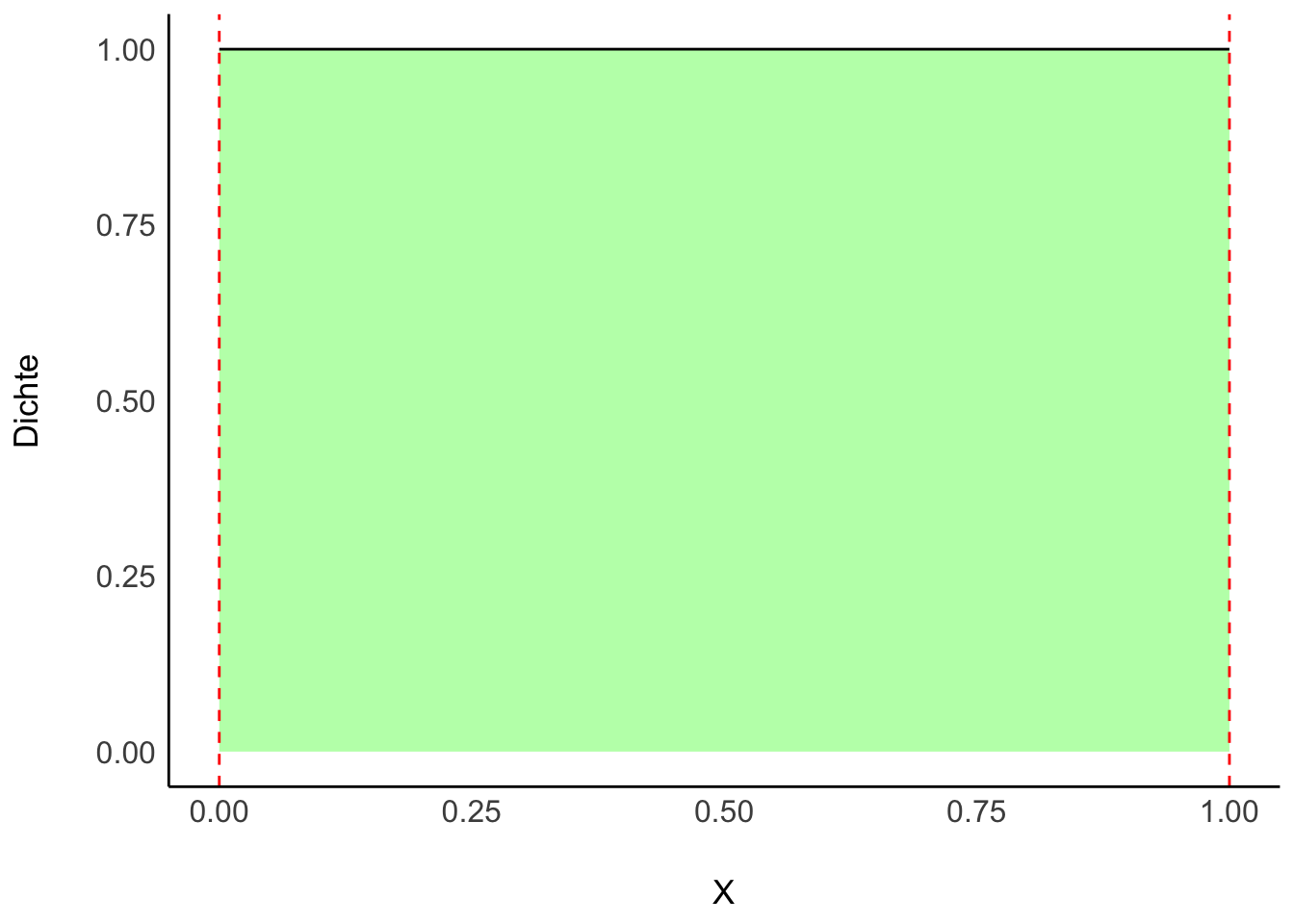
Unser Vorab- bzw. Apriori-Wissen zu \(\pi\) sei, dass uns alle Werte gleich (“uniform”) plausibel erscheinen, s. Gleichung 6.3.
\[\pi \sim \text{Unif}(0,1). \tag{6.3}\]
Lies: “\(\pi\) ist gleich (uniform) verteilt mit der Untergrenze 0 und der Obergrenze 1”.
Man könnte auch sagen: Wir haben praktisch kein Vorwissen, wir sind erstmal (apriori) indifferent; jeder Parameterwert erscheint uns erstmal gleich wahrscheinlich, s. Abbildung 6.7.
6.3.6 Aposteriori-Verteilung
Definition 6.4 (Aposteriori-Verteilung) die Aposteriori-Verteilung (kurz: “Post-Verteilung”) quantifiziert unser Wissen zu den Parameterwerten nach Kenntnis der Daten und aufbauend auf unserem Vorwissen (Apriori-Wissen). Die Aposteriori-Verteilung ist das Ergebnis des Bayes-Updates; man bezeichnet sie kurz mit \(Pr(H|D)\). Lies: “Die Wahrscheinlichkeit der Hypothese H gegeben der Daten D.” \(\square\)
Dabei nimmt man stillschweigend an, dass die Daten anhand eines gewissen Modells generiert wurden, z.B. der Binomialverteilung, sodass die Likelihood \(Pr(D|H)\) berechnet werden kann. Abbildung 7.1 zeigt die Post-Verteilung für unser Globusbeispiel (6 Wasser bei 9 Würfen).
6.4 Bayes’ Theorem
6.4.1 Wozu wird Bayes in der Praxis genutzt?
In der Praxis nutzt man Bayes häufig, wenn man Daten \(D\) gesammelt hat, und wissen möchte, wie wahrscheinlich eine Hypothese \(H\) ist, m Lichte dieser gesammelten Daten, s. ?thm-bayes1. Anders gesagt: Die Likelihood ist relativ einfach zu bestimmen, \(Pr(D|H)\), aber nicht so interessant. Die Aposteriori-Wahrscheinlichkeit, \(Pr(H|D)\), ist schwerer zu bestimmen, aber interessanter. Man könnte also sinnbildlich sagen, das Bayes-Theorem ist eine “Maschine”, die die Apriori-Wahrscheinlichkeit zusammen mit der Likelihood zur Aposteriori-Wahrscheinlichkeit “umbaut”.
\[Pr(H|D) = \frac{ Pr(H) \cdot Pr(D|H) }{Pr(D)} \tag{6.4}\]
6.4.2 Bayes’ Theorem
\[ Pr(H|D) = \frac{ Pr(H) \cdot Pr(D|H) }{Pr(D)} = \frac{\text{Apriori} \cdot \text{Likelihood}} {\text{Evidenz}}\quad \square \]
Bayes’ Theorem (Theorem 6.3) fragt nach \(Pr(H|D)\):
Was ist die Wahrscheinlichkeit der Hypothese H, jetzt wo wir die Daten kennen?
Und antwortet so (Gleichung 6.4):
Diese Wahrscheinlichkeit entspricht der Apriori-Wahrscheinlichkeit der Hypothese mal der Plausibilität (Likelihood) der Daten unter Annahme (gegeben) der Hypothese. Aus Standardisierungsgründen dividiert man noch die totale Wahrscheinlichkeit der Daten über alle Hypothesen (durch die sog. Evidenz).
Für unser Globusbeispiel:
Wie wahrscheinlich ist denn jetzt ein bestimmter Wasseranteil auf der Erde, \(\pi\), (gegeben den Daten, \(W=6\) und \(L=3\)) und wenn wir jede Hypothese apriori für gleich wahrscheinlich halten? Also, wie wahrscheinlich ist z.B. ein Wasseranteil von 70% oder von 50%?
6.4.3 Die Evidenz zur Standardisierung
Die Aufgabe der Evidenz ist nur dafür zu sorgen, dass der Wert von \(Pr(H|D)\) insgesamt nur Werte zwischen 0 und 1 annehmen kann, also eine brave, normale Wahrscheinlichkeit ist. Würde man in ?thm-bayes1 nicht durch die Evidenz teilen, so wäre die Aposteriori-Wahrscheinlichkeit nicht normiert, d.h. sie könnte Werte >1 annehmen, was ja nicht sein darf.
Definition 6.5 (Evidenz) \(Pr(D)\) nennt man die Evidenz.
Die Evidenz berechnet sich als Summe der Likelihoods für alle Parameterwerte \(H_i\), d.h. als die totale Wahrscheinlichkeit von \(D\), s. Theorem 6.1, vgl. Definition 4.8. \(\square\)
Theorem 6.1 (Evidenz) \[\begin{aligned} Pr(D) = \sum_{i=1}^n Pr(D|H_i) \cdot Pr(H_i) \end{aligned}\quad \square\]
Die verschiedenen Parameterwerte kann man auch als die verschiedenen Hypothesen \(H_i\) auffassen. Falls es nur zwei Hypothesen bzw. Parameterwerte gibt, vereinfacht sich Theorem 6.1 zu Theorem 6.2.
Theorem 6.2 (Evidenz bei zwei Hypothesen) \[\begin{aligned} Pr(D) = Pr(D|H_1) \cdot Pr(H_1) + Pr(D|H_2) \cdot Pr(H_2) \end{aligned}\quad \square\]
Beispiel 6.8 In Beispiel 6.10 betrug der Wert der Evidenz \(0.03 + 0.002 + 0.012 = 0.044\), also ca. 4%. \(\square\)
Schauen wir uns die Bestandteile von Bayes’ Theorem (?thm-bayes1) noch etwas näher an:
- (standardisierte) Aposteriori-Wahrscheinlichkeit: \(Pr_{Post} := Pr(H|D)\)
- Likelihood: \(L := Pr(D|H)\)
- Apriori-Wahrscheinlichkeit: \(Pr_{Apriori} := Pr(H)\)
- Evidenz: \(E := Pr(D)\)
- unstandardisierte Aposteriori-Wahrscheinlichkeit: \(Pr_{\text{unPost}} = Pr_{\text{Apriori}} \cdot L\)
Bayes’ Theorem gibt die \(Pr_{Post}\) an, wenn man die Gleichung mit der \(Pr_{Apriori}\) und dem \(L\) füttert. Bayes’ Theorem wird verwendet, um die \(Pr_{Post}\) zu quantifizieren. Die \(Pr_{Post}\) ist proportional zu \(Pr_{unPost} = L \times Pr_{Apriori}\).
6.4.4 Posteriori als Produkt von Priori und Likelihood
Die unstandardisierte Post-Wahrscheinlichkeit \(Pr_{\text{unPost}}\) ist einfach das Produkt von Likelihood und Priori, s. Gleichung 6.5.
\[Pr_{\text{unPost}} = L \times \text{Priori} \tag{6.5}\]
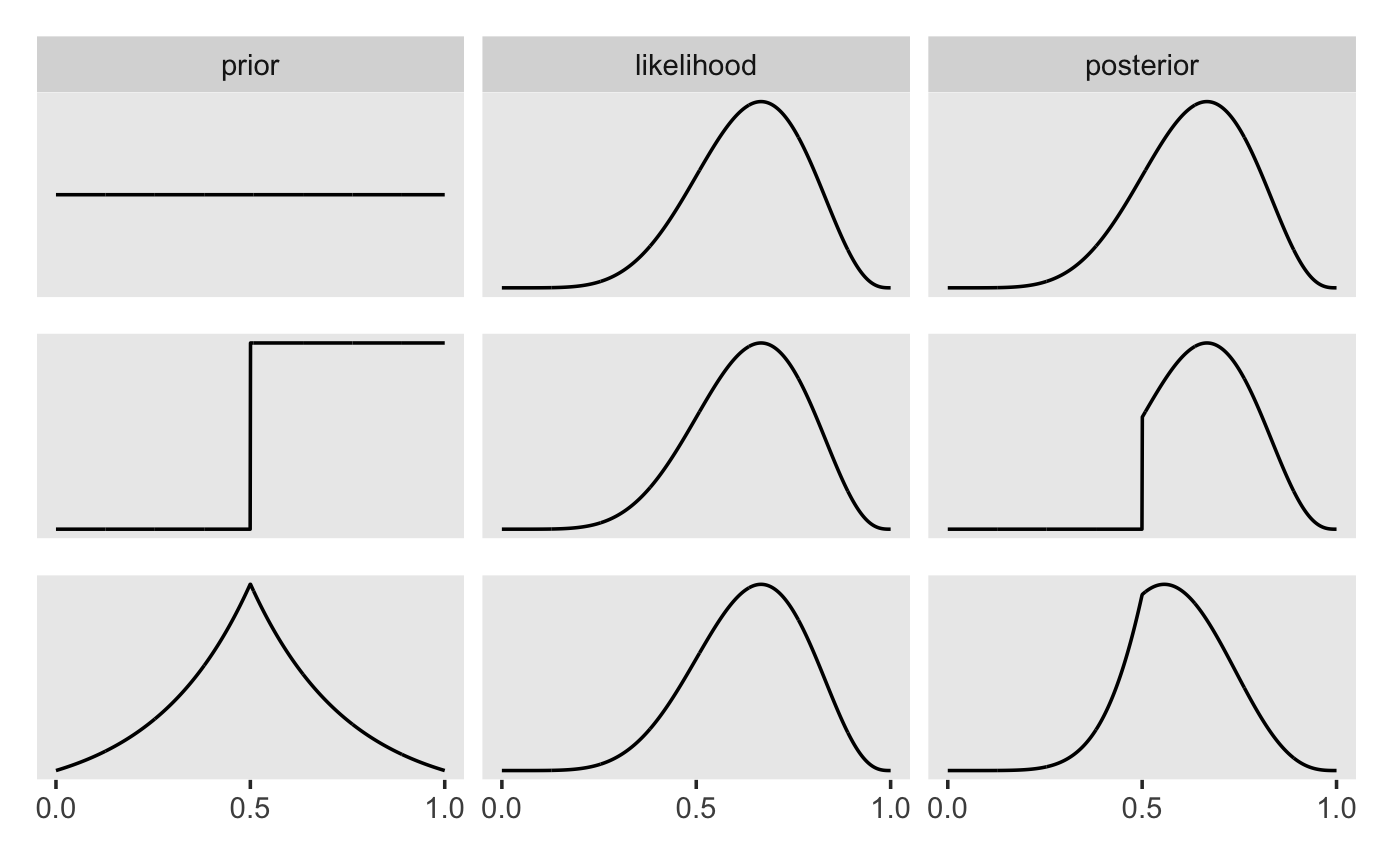
Abb. Abbildung 6.8 visualisiert, dass die Post-Verteilung eine Gewichtung von Apriori und Likelihood ist (das gilt sowohl für die unstandardisierte als auch für die standardisierte Post-Verteilung). Mathematisch gesprochen beruht diese Gewichtung auf einer einfachen Multiplikationen der beiden genannten Terme.
Standardisiert man die unstandardisierte Post-Verteilung, so erhält man die standardisierte Post-Verteilung. Das Standardisieren dient nur dazu, einen Wert zwischen 0 und 1 zu erhalten. Dies erreichen wir, indem wir durch die Summe aller Post-Wahrscheinlichkeiten dividieren. Die Summe der Post-Wahrscheinlichkeiten bezeichnet man (auch) als Evidenz, vgl. Gleichung Gleichung 6.6.
\[\text{Posteriori} = \frac{\text{Likelihood} \times \text{Priori}}{\text{Evidenz}} \tag{6.6}\]
6.4.5 Wissen updaten: Wir füttern Daten in das Modell
Golems können lernen?! Abbildung 6.9 zeigt die Post-Verteilung, nach \(n=1, 2, ...,n=9\) Datenpunkten, d.h. Würfen mit dem Globusball. Man sieht: Am Anfang, apriori, also bevor die Daten kennen, vor dem ersten Wurf also, ist jeder Parameterwert gleich wahrscheinlich für den Golem (das Modell). Je nach Ergebnis des Wurfes verändert sich die Wahrscheinlichkeit der Parameterwerte, kurz gesagt, die Post-Verteilung verändert sich in Abhängigkeit von den Daten.

Insofern kann man sagen: Unser Golem (das Modell) lernt. Ob das Modell nützlich ist (präzise Vorhersagen liefert), steht auf einem anderen Blatt.
6.5 Die Post berechnen mit mit der Bayesbox
Wir erstellen uns eine kleine Tabelle, die man “Bayesbox” nennen könnte.9 Unser Ziel ist es, die Posteriori-Wahrscheinlichkeit für verschiedene Parameterwerte zu berechnen, also die Wahrscheinlichkeit, dass ein bestimmter Wasseranteil \(\pi\) vorliegt, gegeben die Daten (6 Wasser bei 9 Würfen). Dazu gehen wir so vor:
6.5.1 Die Idee der Bayesbox
- Teile den Wertebereich des Parameters in ein “Gitter” auf, z.B. \(0.1, 0.2, ..., 0.9, 1\).
- Wähle die Apriori-Wahrscheinlichkeit für jeden Parameterwert, z.B. 1/11 bei einer diskreten Gleichverteilung von 0 bis 1.
- Berechne die Likelihood für jeden Parameterwert.
- Berechne den unstandardisierten Aposteriori-Wert für jeden Parameterwert (Produkt von Apriori und Likelihood).
- Standardisiere den Aposteriori-Wert durch Teilen anhand der Summe aller unstandardisierten Aposteriori-Wahrscheinlichkeiten.
Für jeden Parameterwert berechnen wir eine (Post-)Wahrscheinlichkeit.10 Häufig entspricht eine Hypothese einem Parameterwert, etwa wenn man sagt: “Ich glaube, die Münze ist fair”, was auf einen Parameterwert von 50% herausläuft. Dazu geben wir an, für wie wahrscheinlich wir apriori11 – also bevor wir irgendwelche Daten erheben – jeden einzelnen Parameterwert halten. Wir machen es uns hier einfach und halten jeden Parameterwert für gleich wahrscheinlich.
Tatsächlich ist der konkrete Wert hier egal, solange wir allen Parameterwerten denselben Wert geben, wird sich die standardisierte Aposteriori-Wahrscheinlichkeit nicht ändern.
Entscheidend ist das Verhältnis der Apriori-Werte zueinander: Geben wir einem Parameterwerten den Wert 2, aber einem anderen den Wert 1, so halten wir Ersteren für (apriori) doppelt so plausibel wie Letztere. Die Post-Wahrscheinlichkeit für den Ersteren wird dann auch doppelt so groß sein wie die für Letztere (alles andere konstant gehalten).
Die “End-Wahrscheinlichkeit”, die unstandardisierte Post-Wahrscheinlichkeit, die “hinten rauskommt” ist das Produkt von Apriori-Wert und Likelihood. Anschaulich gesprochen: Die Apriori-Werte werden mit den Likelihoodwerten gewichtet12. Da wir letztlich eine Wahrscheinlichkeitverteilung bekommen möchten, teilen wir jeden Aposteriori-Wert durch die Summe aller Aposteriori-Werte. Dadurch ist gerantiert, dass sich die Aposteriori-Werte zu eins aufaddieren. Damit haben wir dann die Ansprüche an eine Wahrscheinlichkeitsverteilung erfüllt (vgl. Kapitel 3.3.3).
6.5.2 Bayesbox in R berechnen
Legen wir uns ein Gitter mit Parameterwerten (\(\pi\)) an, um deren Aposteriori-Wahrscheinlichkeit zu berechnen. Konkret gesprochen: Wir listen jeden für uns interessanten Wasseranteil (\(\pi\)) auf, also \(\pi=0, 0.1, 0.2, ..., 1\). Diese Parameterwerte sind die Hypothesen, die wir testen wollen, s. Listing 6.2.
wasseranteile <- seq(from = 0, to = 1, by = 0.1) # Parameterwerte
wasseranteile
## [1] 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Dann berechnen wir schon mal die Wahrscheinlichkeit der Daten (6 W bei 9 Würfen) gegeben jeweils eines Wasseranteils.
Likelihood <- dbinom(6, size = 9, prob = wasseranteile)
Likelihood
## [1] 0.0e+00 6.1e-05 2.8e-03 2.1e-02 7.4e-02 1.6e-01 2.5e-01 2.7e-01 1.8e-01
## [10] 4.5e-02 0.0e+00Schließlich packen wir das alles in eine Tabelle, die “Bayesbox”, s. Tabelle 6.2 und Listing 6.3.
bayesbox_globusversuch <-
tibble(
# definiere die Hypothesen (die Parameterwerte, p):
p = wasseranteile,
# Lege den Apriori-Wert für alle Parameterwerte auf 1/11 fest:
Apriori = 1/11) |>
mutate(
# berechne Likelihood für jeden Wasseranteil (Parameterwert):
Likelihood = Likelihood,
# berechne unstand. Aposteriori-Werte:
unstd_Post = Likelihood * Apriori,
# berechne Evidenz, d.i. die Summe aller unstand. Post-Werte:
Evidenz = sum(unstd_Post),
# berechne stand. Aposteriori-Werte (summiert zu 1):
Post = unstd_Post / Evidenz) Die Bayesbox (Tabelle 6.2) zeigt, wie sich die Post-Verteilung berechnet.
| id | p | Apriori | Likelihood | unstd_Post | Evidenz | Post |
|---|---|---|---|---|---|---|
| 1 | 0.0 | 0.091 | 0.000 | 0.000 | 0.091 | 0.000 |
| 2 | 0.1 | 0.091 | 0.000 | 0.000 | 0.091 | 0.000 |
| 3 | 0.2 | 0.091 | 0.003 | 0.000 | 0.091 | 0.003 |
| 4 | 0.3 | 0.091 | 0.021 | 0.002 | 0.091 | 0.021 |
| 5 | 0.4 | 0.091 | 0.074 | 0.007 | 0.091 | 0.074 |
| 6 | 0.5 | 0.091 | 0.164 | 0.015 | 0.091 | 0.164 |
| 7 | 0.6 | 0.091 | 0.251 | 0.023 | 0.091 | 0.251 |
| 8 | 0.7 | 0.091 | 0.267 | 0.024 | 0.091 | 0.267 |
| 9 | 0.8 | 0.091 | 0.176 | 0.016 | 0.091 | 0.176 |
| 10 | 0.9 | 0.091 | 0.045 | 0.004 | 0.091 | 0.045 |
| 11 | 1.0 | 0.091 | 0.000 | 0.000 | 0.091 | 0.000 |
Für jede Hypothese (Spalte id) berechnen wir die unstandardisierte Aposteriori-Wahrscheinlichkeit als Produkt von Apriori und Likelihood.
Um zur standardisierten Aposteriori-Wahrscheinlichkeit zu gelangten, teilen wir in jeder Zeile der Bayesbox (also für jede Hypothese) die unstandardisierte Post-Wahrscheinlichkeit durch die Summe
der unstandardisierten Post-Wahrscheinlichkeiten, s. Gleichung 6.7.
\[\text{Post} = \frac{\text{Post}_{\text{unstand}}}{\text{Evidenz}} = \frac{Pr(H) \cdot Pr(H|D)}{Pr(D)} \tag{6.7}\]
Dabei haben wir die Apriori-Wahrscheinlichkeit für alle Parameterwerte als gleich angenommen, da wir keinerlei Vorwissen hatten, \(Pr(H_i) = 1/11\). Die Evidenz berechnet sich als Summe der unstandardisierten Post-Wahrscheinlichkeiten, \(Pr(D) = \sum Pr_{unstandPost}=0.09\).
Wenn die Apriori-Wahrscheinlichkeit für alle Hypothesen gleich ist, dann ist die standardisierte Aposteriori-Wahrscheinlichkeit identisch mit der Likelihood. Denn die Post-Wahrscheinlichkeit ist die um die Priori-Wahrscheinlichkeit gewichtete Likelihood. Sind die Apriori-Wahrscheinlichkeiten alle gleich, so ist die Gewichtung der Likelihood für alle Hypothesen gleich.
Beispiel 6.9 (Post-Wahrscheinlichkeit im Globusversuch für p=.7) In Beispiel 6.5 haben wir die Wahrscheinlichkeit für 6 Treffer bei 9 Würfen gegeben einer Trefferwahrscheinlichkeit von \(\pi = .7\) berechnet. Damit haben wir die Likelihood \(L = Pr(D|H) =.27\) berechnet.
Auf dieser Basis können wir die Aposteriori-Wahrscheinlichkeit \(Pr_{Post}\) berechnen, zunächst die unstandardisierte. Dazu haben wir die Apriori-Wahrscheinlichkeit mit der Likelihood multipliziert, s. Gleichung 6.8:
\[ \text{Post}_{\text{unstand}} = Pr(H) \cdot Pr(D|H) = 1/11 \cdot 0.2668 = 0.024 \tag{6.8}\]
Jetzt standardisieren wir die unstandardisierte Post-Wahrscheinlichkeit, indem wir durch die Evidenz dividieren, s. Gleichung 6.9.
\[\ text{Post} = \frac{\text{Post}_{\text{unstand}}}{\text{Evidenz}} = \frac{0.024}{0.09} = 0.267 \tag{6.9}\]
Fazit: Nach dem Versuch, d.h. nachdem wir die Daten in Betracht gezogen haben, hat sich unsere Meinung über den Wasseranteil von \(\pi=.7\) aktualisiert von 0.09 auf 0.27 – das ist eine Verdreifachung. Wir sind uns drei Mal so sicher wie vor dem Versuch, dass der Wasseranteil bei 70% liegt. \(\square\)
Übungsaufgabe 6.4 🏋️ Was wohl mit Post passiert, wenn wir Apriori ändern?\(\square\)
Abbildung 7.1 zeigt eine Visualisierung der Post-Verteilung mit Hilfe der Funktion ggline(x, y) aus dem Paket ggpubr. Wie man sieht, ist die Post-Wahrscheinlichkeit am höchsten bei \(\pi=0.7\). Wobei der Bereich von 0.6 bis 0.8 auch recht wahrscheinlich ist.
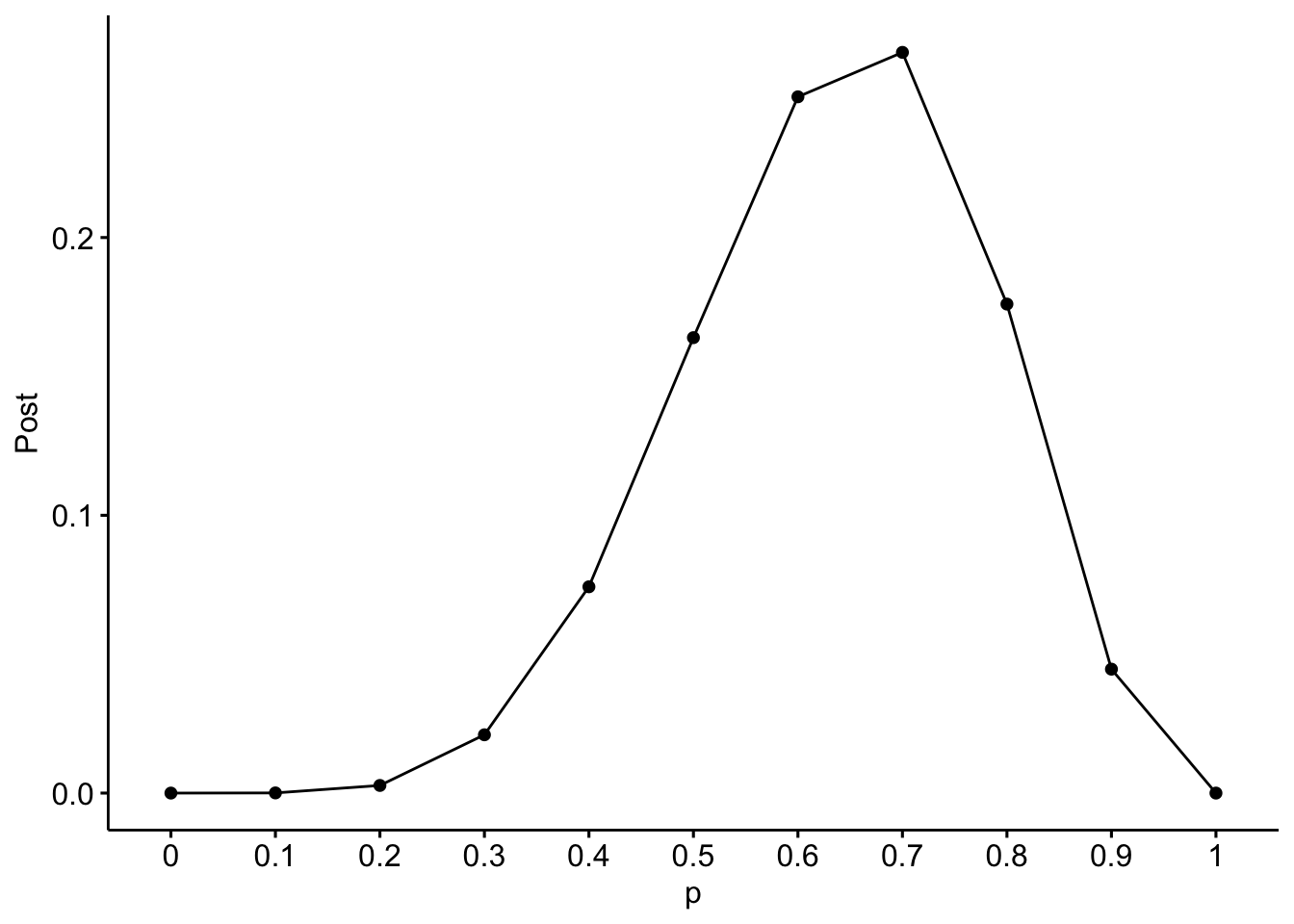
6.5.3 Was sagt die Post?
Die Aposteriori-Verteilung (Kurz: “Post-Verteilung”, oder “Post”), \(Pr_{Post}\), sagt, wie plausibel wir jeden Wert von \(p\) halten, jetzt, nachdem wir die Daten des Versuchs kennen. Die Post-Wahrscheinlichkeit updatet unser Apriori-Wissen mit dem Wissen, das wir durch die Daten erhalten haben.
Abbildung 6.11 zeigt die Post-Wahrscheinlichkeit für 5, 10 und 20 Parameterwerte. Das mittlere Teilbild mit 10 Parameterwerten entspricht unserer Tabelle oben. Man sieht: Je mehr Parameterwerte, desto “glatter” wird die Verteilung.
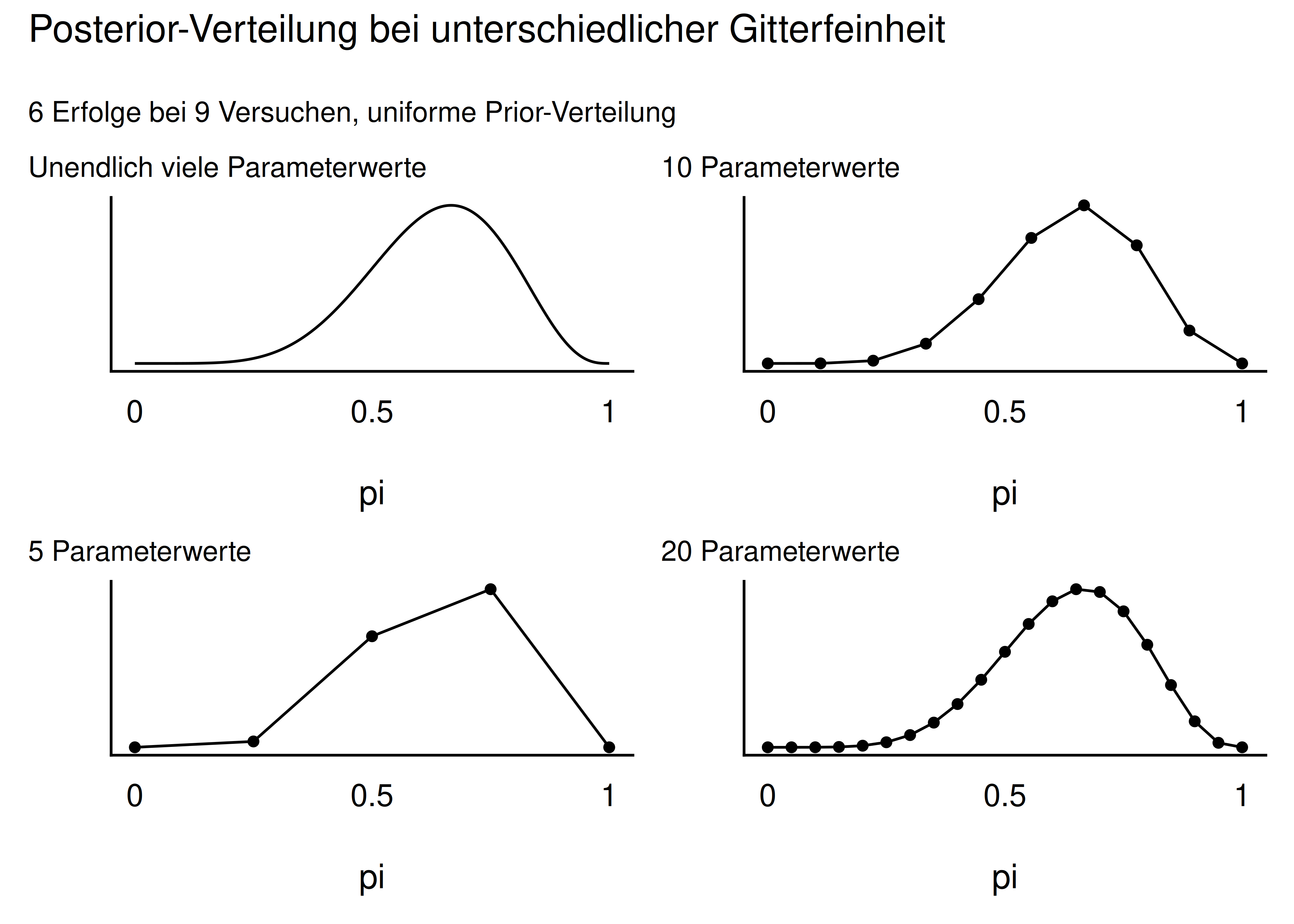
Die Post-Verteilung ist sowas wie das Ziel all Ihrer Träume (falls Sie es noch nicht gewusst haben): Aus der Post-Verteilung können Sie ablesen, wie wahrscheinlich Ihre Hypothese (Ihr Lieblings-Parameterwert) ist. Und noch einiges mehr, aber das ist Thema des nächsten Kapitels. \(\square\)
Übungsaufgabe 6.5 (Peer Instruction: Schlüsse ziehen mit dem Bayes-Modell) Auf einer Party: Unterhalten sich fünf Studis über das Bayesmodell. Einer hat Unrecht, die anderen Recht. Aber wer?
Wenn eine Hypothese \(A\) apriori doppelt so wahrscheinlich ist wie die anderen und die Likelihoods für alle Hypothesen gleich ist, dann ist \(A\) aposteriori auch doppelt so wahrscheinlich wie die anderen Hypothesen.
Sind alle Hypothesen apriori gleich wahrscheinlich, dann hat die Hypothese mit dem höchsten Likelihood aposteriori auch die höchste Post-Wahrscheinlichkeit.
Hat eine Hypothese apriori die Wahrscheinlichkeit Null, so hat sie automatisch aposteriori auch die Wahrscheinlichkeit Null, unabhängig von ihrer Likelihood.
Die unstandardisierte Aposteriori-Wahrscheinlichkeit ist gleich der standardisierten mal einen Faktor \(k\).
Hat eine Hypothese die höchste Likelihood, so hat sie automatisch auch die höchste Wahrscheinlichkeit aposteriori. \(\square\)
6.6 Abschluss
6.6.1 Zusammenfassung
- In unserem Modell haben wir Annahmen zu \(Pr_{Apriori}\) und \(L\) getroffen.
- Auf dieser Basis hat der Golem sein Wissen geupdated zu \(Pr_{Post}\).
- Mit der Bayesbox haben wir viele Hypothesen (Parameterwerte) untersucht und jeweils die \(Pr_{Post}\) berechnet.
- Unser Modell bildet die kleine Welt ab; ob es in der großen Welt nützlich ist, steht auf einem anderen Blatt.
🏋️ Wenn Sie auf einen Prozentwert für \(W\) tippen müssten, welchen würden Sie nehmen, laut dem Modell (und gegeben der Daten)? \(\square\)
6.6.2 Der Globusversuch als Modell für zweiwertige Zufallsversuche
Der Globusversuch ist kein prototypisches Beispiel für Statistik in der Praxis, zumindest nicht auf dem ersten Blick. Er hat aber aber den Vorteil, dass es ein einfaches, gut greifbares Beispiel ist, und damit zum Lernen gut geeignet ist. Bei näherer Betrachtung ist der Globusversuch prototypisch für ganz viele Fragestellungen:
- Von einem neuen Produkt von von \(n\) Exemplaren \(k\) verkauft. Auf welchen Wert \(p\) kann die Akzeptanzrate dieses Produkts geschätzt werden?
- Ein Chat-Bot hat von \(n\) Fragen \(k\) richtig beantwortet. Wie hoch kann die Verständnisrate \(p\) dieses Programms geschätzt werden?
- Eine neue Krebstherapie hat von \(n\) “austherapierten” Patientis \(k\) geheilt. Auf wie hoch kann die Erfolgsrate dieser Therapie geschätzt werden?
Kurz: Der Globusversuch ist ein Muster für zweiwertige Zufallsversuche. Und solche sind häufig im Leben, im Business und in der Wissenschaft.
6.7 Vertiefung
6.7.1 Bayes-Video von 3b1b
Das “Bayes-Paradox-Video” von 3b1b präsentiert eine gut verständliche Darstellung des Bayes-Theorem aus einer zwar nicht gleichen, aber ähnlichen Darstellung wie in diesem Kapitel.
6.7.2 Bayes als Baum
Bayes’ Theorem kann man sich als als Baumdiagramm vor Augen führen, Abbildung 6.12.
Gesucht sei \(Pr(M_1|A)\), also: die Wahrscheinlichkeit, dass das Teil von Maschine 1 produziert wurde, gegeben, dass es Ausschuss ist. Gegeben sind die Wahrscheinlichkeiten, dass Machine \(i\) das Teil produziert hat, \(Pr(M_i)\). Außerdem sind die Wahrscheinlichkeiten, dass das Teil Ausschuss ist, \(Pr(A|M_i)\), bekannt.
Das Diagramm löst die Aufgabe für uns; es zeigt damit die Anwendung von Bayes’ Theorem auf.
Um \(Pr(M_1|A)\) zu erhalten, setzt man die Wahrscheinlichkeit des günstigen Asts ins Verhältnis zur Wahrscheinlichkeit aller relevanten Äste, \(Pr(A)\).
Beispiel 6.10 (Maschine produziert Ausschuss) Die drei Maschinen \(M_1, M_2, M_3\) produzieren den gleichen Artikel. Ihr jeweiliger Anteil, an der Produktion liegt bei 60%, 10% bzw. 30%. Die jeweilige Ausschussquote liegt bei 5, 2, bzw. 4%, s. Abbildung 6.12.
Aufgabe: Wie groß ist die Wahrscheinlichkeit, dass ein defektes Teil von Maschine 1 produziert wurde? Berechnen Sie diese Wahrscheinlichkeit.\(\square\)
Der günstige (gesuchte) Ast, \(Pr(M1 \cap A)\), ist hier fett gedruckt, s. Abbildung 6.12. In Abbildung 6.12 zeigen die runden Kästchen am Ende der Pfade die Wahrscheinlichkeiten des jeweiligen Pfades an.
flowchart LR A[Start] ==>|0.60|B[M1] A --->|0.10|C[M2] A --->|0.30|D[M3] B ==>|0.05|E[A] B -->|0.95|F[Nicht-A] C --->|0.02|G[A] C --->|0.98|H[Nicht-A] D --->|0.04|I[A] D --->|0.96|J[Nicht-A] E --- K((0.030)) F --- L((0.570)) G --- M((0.002)) H --- N((0.098)) I --- O((0.012)) J --- P((0.288))
\[Pr(M1|A) = \frac{Pr(M1 \cap A)}{Pr(A)} = \frac{0.6 \cdot 0.05}{0.03 + 0.002 + 0.012} = \frac{0.03}{0.044} \approx 0.68\]
\(Pr(M1|A)\) beträgt also ca. 68%.
Zur Erinnerung: \(Pr(A)\) ist die totale Wahrscheinlichkeit (dass ein produziertes Teil Ausschuss ist).
6.7.3 Bayes als bedingte Wahrscheinlichkeit
Bayes’ Theorem wird verwendet, um die Wahrscheinlichkeit einer Hypothese, gegeben einer bestimmten Datenlage und basierend auf einer Apriori-Wahrscheinlichkeit dieser Hypothese zu berechnen. Man berechnet also \(Pr(H|D)\). Bayes’ Theorem ist nichts anderes als eine normale bedingte Wahrscheinlichkeit.
\(Pr(H| D)\) kann man umformen (vgl. Theorem 4.3 und Definition 4.6), dann erhält man Bayes’ Theorem, s. Theorem 6.3.
Theorem 6.3 (Bayes’ Theorem als bedinte Wahrscheinlichkeit) \[\begin{aligned} Pr(H|D) &=\frac{\overbrace{ Pr(H\cap D)}^\text{umformen}}{Pr(D)} \\ &= \frac{\overbrace{Pr(H)}^\text{Apriori-Wahrscheinlichkeit} \cdot \overbrace{Pr(D|H)}^\text{Likelihood}}{\underbrace{Pr(D)}_\text{Evidenz}} \end{aligned}\quad \square\]
6.7.4 Weitere Herleitung der Bayes-Formel
Man kann sich Bayes’ Theorem auch wie folgt herleiten:
\(Pr(D\cap H) = Pr(D \cap H) = Pr(D) \cdot Pr(H|D) = Pr(H) \cdot Pr(D|H)\)
Dann lösen wir nach P\((H|D)\) auf, s. Gleichung 6.10.
\[Pr(H|D) = \frac{\overbrace{Pr(H)}^\text{Apriori-Wahrscheinlichkeit} \cdot \overbrace{Pr(D|H)}^\text{Likelihood}}{\underbrace{Pr(D)}_\text{Evidenz}} \tag{6.10}\]
6.7.5 Zusammengesetzte Hypothesen
Das ist vielleicht ein bisschen fancy, aber man kann Bayes’ Theorem auch nutzen, um die Wahrscheinlichkeit einer zusammengesetzten Hypothese zu berechnen: \(H = H_1 \cap H_2\). Ein Beispiel wäre: “Was ist die Wahrscheinlichkeit, dass es Regen (\(R\)) und Blitzeis (\(B\)) gibt, wenn es kalt (\(K\)) ist?”.
Das sieht dann so aus, Gleichung 6.11:
\[ \begin{aligned} Pr(R \cap B |K) &= \frac{ Pr(R \cap B) \cdot Pr(K|R \cap B) }{Pr(D)} \\ &= \frac{ Pr(R ) \cdot Pr(B) \cdot Pr(K|R \cap B) }{Pr(D)} \end{aligned} \tag{6.11}\]
Hier haben wir \(Pr(R \cap B)\) aufgelöst in \(Pr(R) \cdot Pr(B)\), das ist nur zulässig, wenn \(R\) und \(B\) unabhängig sind.
6.8 Aufgaben
Einige der folgenden Aufgaben sind in englischer Sprache. Wenn Ihnen eine andere Sprache (z.B. Deutsch) lieber ist, nutzen Sie einfach die Übersetzungsfunktion Ihres Browsers. Das sind meist nur zwei Klicks. \(\square\)
6.8.1 Papier-und-Bleistift-Aufgaben
6.8.2 Aufgaben, für die man einen Computer braucht
6.9 —

wenn auch nicht als Erster↩︎
Warum gerade 9 Mal? Tja, dann hat das Handy geklingelt… Auch in wissenschaftlichen Versuchen ist (leider?) nicht immer alles genau geregelt.↩︎
Ihr Ergebnis kann anders aussehen, schließlich ist es ja Zufall.↩︎
oder den?↩︎
zu Deutsch etwa: “Mutmaßlichkeit”↩︎
Anstatt von Apriori liest man auch Prior oder Priori; anstatt Aposteriori auch Posterior↩︎
Die sog. “iid-Annahme”, independently and identically distributed: Jeder Wurf der Globusballes ist eine Realisation der gleichen Zufallsvariablen. Jeder Wurf ist unabhängig von allen anderen: Das Ergebnis eines Wurfes hat keinen (stochastischen) Einfluss auf ein Ergebnis anderer Würfe. Die Wahrscheinlichkeitsverteilung ist bei jedem Wurf identisch.↩︎
Auch Gitter-Methode oder Grid-Methode genannt.↩︎
Ein Parameterwert ist eine mögliche Ausprägung des Parameters.↩︎
synonym: priori↩︎
synonym: Die Likelihoodwerte werden mit den Apriori-Werten gewichtet.↩︎